樂玩lewin起重科技有限公司
Suzhou Outuo Lifting Technology Co., Ltd
Suzhou Outuo Lifting Technology Co., Ltd

發(fā)源-胡想不會被凍結
最近幾年來,世界列國繚繞焦點技能的節(jié)制與反節(jié)制、爭取與反爭取,險些天天都于表演一幕幕激烈、殘暴的沒有硝煙的戰(zhàn)役。于工業(yè)4.0的年夜配景下,工業(yè)呆板人被認為是智能制造的主要基石。但我國工業(yè)呆板人企業(yè)面對著專利少、焦點專利缺掉的困境,與高歌大進的下流運用市場形成巨年夜的反差。 因為持久以來于焦點技能方面的滯后,我國工業(yè)呆板人財產依然存于著不少的短板,節(jié)制器作為焦點部件被外洋壟斷,我國于焦點技能與美、日、德等國度差距較著。是以企業(yè)擁有自立焦點技能才能得到快速不變的成長。這是所有呆板人范疇從業(yè)者的一個胡想,也是一個永劫間的尋求。 阿童木呆板人作為技能立異型企業(yè),自建立以來連續(xù)投入自立節(jié)制體系的研發(fā)。咱們需要做一款屬在咱們本身的節(jié)制器-AtomMotion。
PART 01-示教器篇需要
年夜顯示屏,
最年夜化的顯示呆板人操作的相干信息;
可以或許包管安全的按鍵操作。
它是咱們抱負的狀況
.png)
(示教器)
一切盡于把握中:10.1寸觸摸屏設計,最年夜化顯示呆板人操作的相干信息。物理急停及使能按鍵設計,更年夜限度的掩護操作工程師的安全。輕量化的選材,為操作工程師提供更關心的眷注。切合現實運用場景的操作界面,最年夜限度的解下班程師的雙手。
PART 02-節(jié)制器篇
需要
高機能處置懲罰器,
要具有及時性,網口包管可擴大性。
它是咱們抱負的狀況
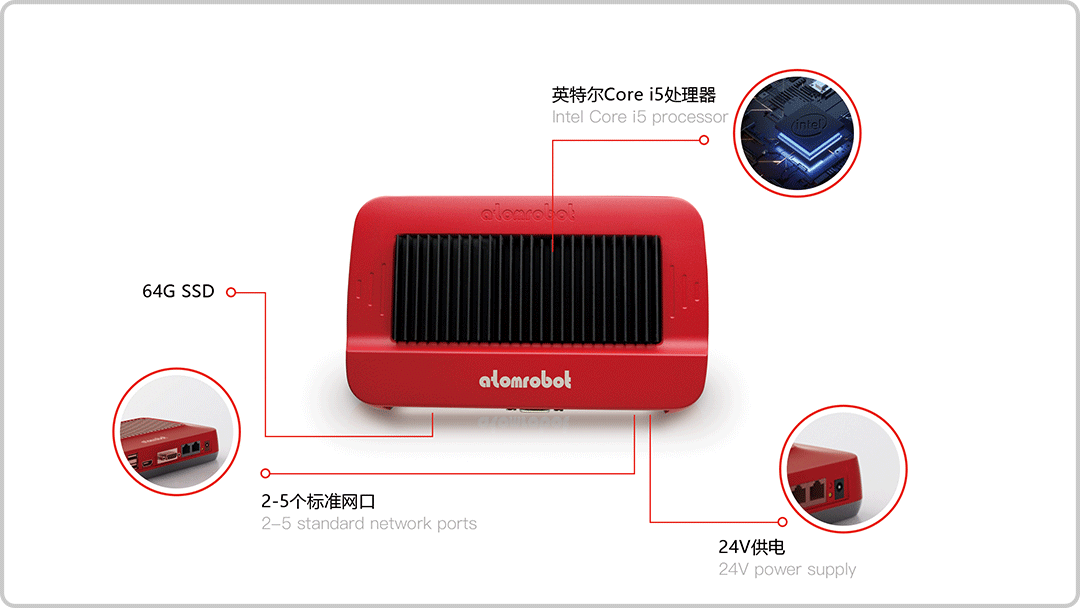
(節(jié)制器)
通用PC的純代碼實現:于X86架構下借助及時通信技能,完成伺服機電的精準節(jié)制。撐持多種并聯(lián)呆板人模子,不僅包羅經常使用的并聯(lián)3軸,并聯(lián)3+1軸呆板人模子,還有包括并聯(lián)4軸、串并混聯(lián)5軸、Stewart等模子。 撐持S型、多項式、sin曲線、cos曲線等速率計劃類型,以滿意工程師于差別場景下的差別需求。撐持單跟蹤、雙跟蹤、圓盤追蹤等差別場所下的跟蹤運動。撐持于力矩模式下的拖動示教,以和繁雜軌跡曲線的復現。
摸索-連著這條路跑下去我國于呆板人范疇與世界處在跟跑、并跑及領跑“三跑”并行階段,外洋仍舊有值患上進修的地方,但海內呆板人企業(yè)也有本身的上風。于新一輪科技及財產厘革的醞釀及推進中,也將為咱們提供可貴的"趕超成長"契機。
呆板人模子篇 2020年Atom呆板人家族中增長了兩個新成員。作為Atom家族中的節(jié)制器,咱們已經經完成D4及S6兩款呆板人的數學模子撐持。
(颶風-D4)
沖破現有構型限定,實現2+2軸串并混聯(lián)統(tǒng)籌高速與高機能。具有沿XYZ軸平動以和繞Z軸扭轉的功效特色。安裝方式多樣矯捷,占地空間小,可簡樸部署在主動化出產線中。 
(6自由度-S6)
經典的 STEWART 并聯(lián)機構,輕松實現空間 6自由度運動,負載到達 3000kg,滿意尋求最高精度及最年夜負載需求。很是適在試驗室、航空航天等行業(yè)的高精度測試功課,重要用在各類物料的裝置及動作模仿等。
算法篇一、 速率:咱們再次優(yōu)化了光滑段算法,于尺度行程下。機械手的速率由220晉升到了252次。

二、振動/精度:于完成為了基本的速率計劃后,AtomMotion優(yōu)化了現有的速率計劃,于不異的測試前提下舉行測試,優(yōu)化后的振動數值降低了快要百分之30。
.jpg)
同時咱們還有闡發(fā)了于差別變量(軌跡長度、光滑比例、運動紀律類型、負載)下的振動體現,試圖找出于差別情況下對于運動的最優(yōu)成果。
.jpg)
(差別加快度類型振動對于比)
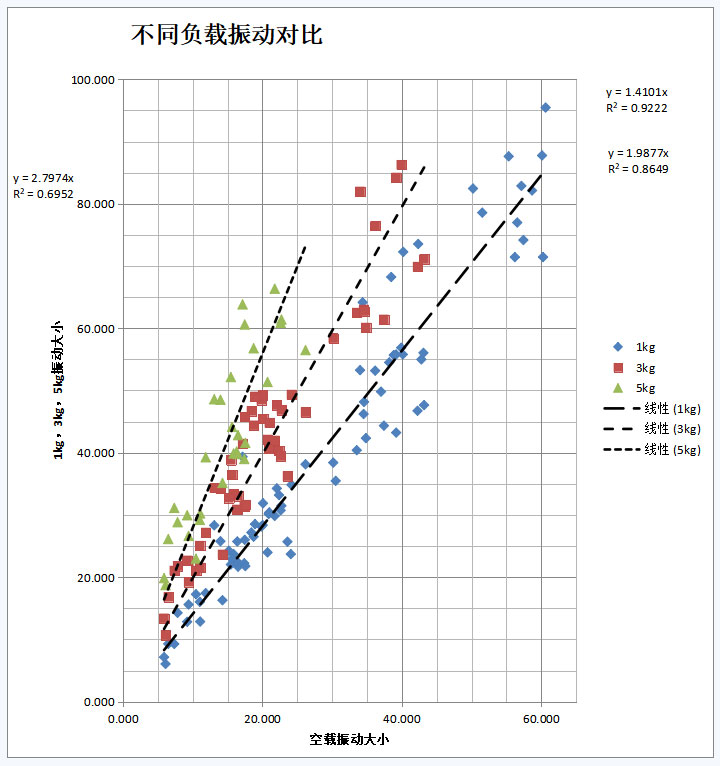
(差別負載)
.jpg)
(差別光滑)
.jpg)
(差別節(jié)奏)
.jpg)
(差別路徑長度)
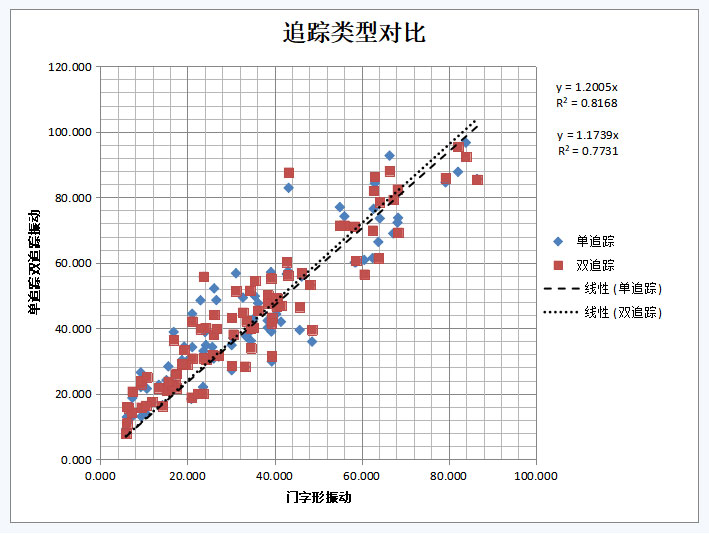
(差別追蹤類型)
三、力矩節(jié)制:咱們還有改良了拖動示教算法,優(yōu)化了拖動示教歷程中的力賠償,使拖動歷程變患上更輕松。同時優(yōu)化了拖動示教的軌跡跟蹤算法,使并聯(lián)呆板人的拖動示教可以或許真實的進入到行業(yè)的出產現場中去。
奧德賽-吾等采石之人,把穩(wěn)懷年夜教堂之愿景 今朝Atom節(jié)制器仍舊有很多問題亟待解決。咱們按照及國際節(jié)制器于不異前提下的振動測試對于比表格,振動數值的成果還有長短常可不雅的。可是咱們于二次開發(fā)性上有所短缺,致使于部門運用場景下運用不敷矯捷。同時于不法則運動紀律下的跟蹤抓取精度不睬想。.jpg)
(振對于對于比)
接下來,咱們仍將連續(xù)不停的晉升Atom自立節(jié)制器的機能及功效,使AtomRobot可以或許順應更多差別的場景、更嚴酷的技能要求。 咱們將經由過程濾波技能的運用,減小機械手于運動歷程中孕育發(fā)生的振動,從而到達振動幅度降低。將連續(xù)優(yōu)化跟蹤運動軌跡,優(yōu)化跟蹤算法進一步縮小跟蹤偏差,終極晉升跟蹤精度。成立二次開發(fā)平臺情況,可以或許順應更多的運用場景。同時進一步優(yōu)化用戶界面操作,降低用戶界面操作的進修成本。
-LEWIN樂玩
